Abstract
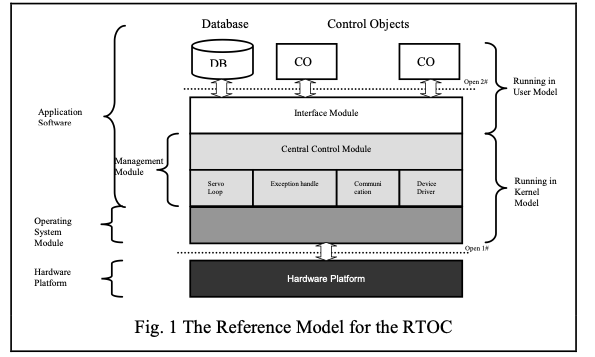
Openness is one of the aims pursued by modern controller systems. The typical features of one controller system include easy extension, flexible reconfiguration, facile portability and jointless interoperation. Therefore, in one open controller, the system elements from multi-disciplinary areas can be integrated and reconfigured easily. Also the system modules can be ported flexibly. In this paper, a real time operating system “Rt-Linux” based open controller system (RTOC) is investigated. A reference model for the open controller is proposed, in which hardware platform, operating system module and application software modules are included. Then the RTOC is realized on Rt-Linux. In RTOC, not only the modules of application software but also those of the Rt-Linux can be extended or reconfigured because of the openness of the “Linux” operating system platform. Two different kinds of reconfiguration — system reconfiguration and module reconfiguration, can be conducted. At the same time, not only the application modules completed in Standard C can be ported to other control systems, but also the software part of RTOC can be ported to other hardware platforms because of the universality of Linux. That is to say, two different levels of portability — system portability and module portability have been realized at the same time. To preserve jointless interoperation, file system based communication methods and hardware independent interface (HII) have been completed in RTOC. Moreover, as modules are allocated, the critical RTOC modules are inserted into the Linux kernel mode, so the real-time performance can be preserved. Consequently, the proposed RTOC is applied to control a fictitious roaming platform (FRP). Its efficiency and performance has been demonstrated.