Abstract
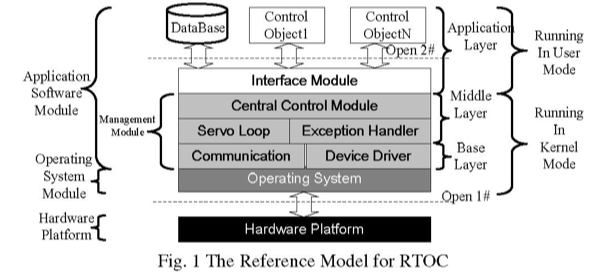
An open robot control system pursues easy extension, flexible reconfiguration, facile portability and jointless interoperation. Therefore, the system elements from multi-disciplinary areas can be integrated and reconfigured easily in such a system. Also the system modules can be ported flexibly. In this paper, a Rt-Linux based open robot controller (RTOC) is investigated. A reference model for robot controlling is proposed, in which hardware platform, operating system module and application modules are included. Then for the implementation of RTOC, two critical implementation problems - layered architecture and the intra-layer interfaces are discussed on the base of its reference model. The RTOC openness is also analyzed. Consequently, the proposed RTOC is applied to an industrial arc welding robot.