Conceiving, analyzing, modeling, verifying and developing-the clews of modeling open software architectures of robot controllers
Abstract
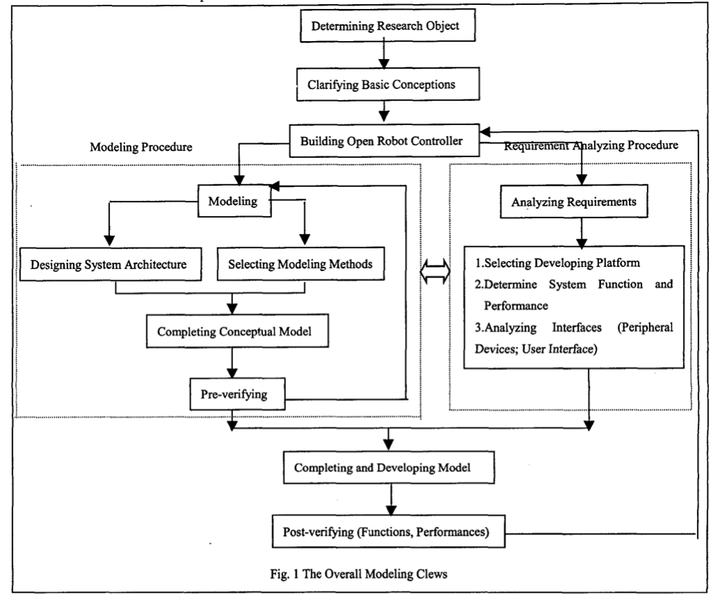
Openness is one of the features of modem robot controllers. Although many modeling technologies about how to model and develop open robot controllers have been discussed, the focus is always on some detail problems in some respects. While the relative complete modeling clews have never been discussed. In this paper, an initial modeling clew is presented. The corresponding contents including basic conceptions, modeling methods, requirement analysis, and testing strategies are discussed in detail.
Type
Publication
2001 International Conferences on Info-Tech and Info-Net. Proceedings