A rough set and fuzzy neural Petri net based method for dynamic knowledge extraction, representation and inference in cooperative multiple robot system
Abstract
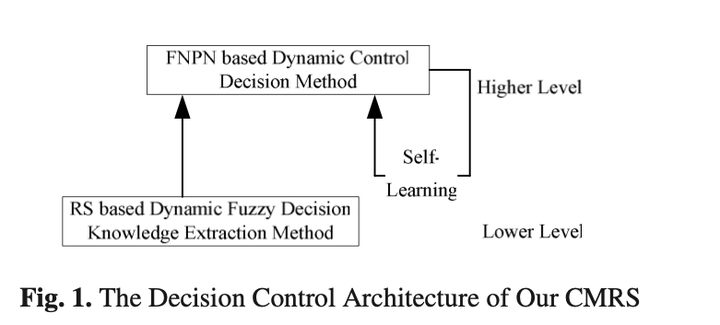
In cooperative multiple robot systems (CMRS), dynamic knowledge representation and inference is the key in scheduling robots to fulfill the cooperation requirements. The first goal of this work is to use rough set based rules generation method to extract dynamic knowledge of our CMRS. Kang’s rough set based rules generation method is used to get fuzzy dynamic knowledge from practical decision data. The second goal of this work is to use Fuzzy Neural Petri nets (FNPN) to represent and infer the dynamic knowledge on the base of dynamic knowledge extraction with self-learning ability. In particular, we investigate a new way to extract, represent and infer dynamic knowledge with self-learning ability in CMRS. Finally, the effectiveness of the dynamic knowledge extraction, representation and inference procedure are demonstrated.