Abstract
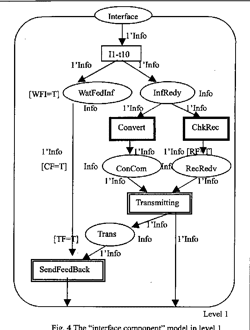
Openness is one of the features of modern open robot controllers. The extending ability of control software is one of the important aspects related to openness. In order to overcome the limit of two existing extending mechanisms, a composite extending mechanism which has mixed their merits is presented. On the foundations of this mechanism, a conceptual model of interface component in the extending mechanism is completed by the means of a hierarchical object-oriented Petri net (HOONet) according to the function analysis results of interface components, because HOONet can support a dynamic extending model and encompass the strong ability of abstraction and verification. This kind of interface component can support not only a communicating function but also a reliability function (information feedback function).
Hua Xu
Tenured Associate Professor, Associate Editor of Expert Systems with Application, Ph.D Supervisor
JingLiang Fang
Visting Postgraduate Student
My research direction is multimodal learning, facial expression recognition, and multi-task learning.